|
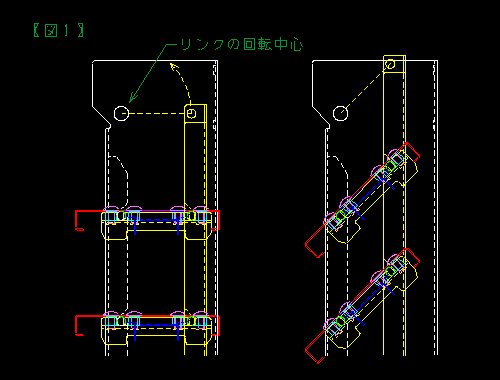 |
【図1】のように、スラットの一斉回転は、黄色で描かれた長尺部品を
平行四辺形の4節リンクで動かすだけです。
リンクの回転中心にモータからの回転を直接つないで、閉止と開放の
位置にセンサーを配置すれば済みそうな構造です。
しかし、閉止と開放の位置よりもオーバーランが起こると、構造の
いたるところにストレスがかかります。
物体の移動には慣性力がついています。
また、センサーの位置検出にも誤差があります。
さらに、今回使用したモータは安価なDCモータで、尚且つ、マイクロ
スイッチで電源をON-OFFするだけの簡単な回路での制御です。
この条件で停止位置の精度を要求するのは難しい状況です。
位置決め制御の精度が高いモータを使用して、物体の慣性力を考慮
しながら制御回路でデバッグを繰り返すという手段もありますが、そ
の作業には専門のエンジニアの力が必要です。
つまり、開発の時間とコストが大幅に膨らむことになります。
そこで、モータのオーバーランがあっても閉止と開放の位置が一定に
保たれるような構造として間欠動作機構を盛り込みました |
|